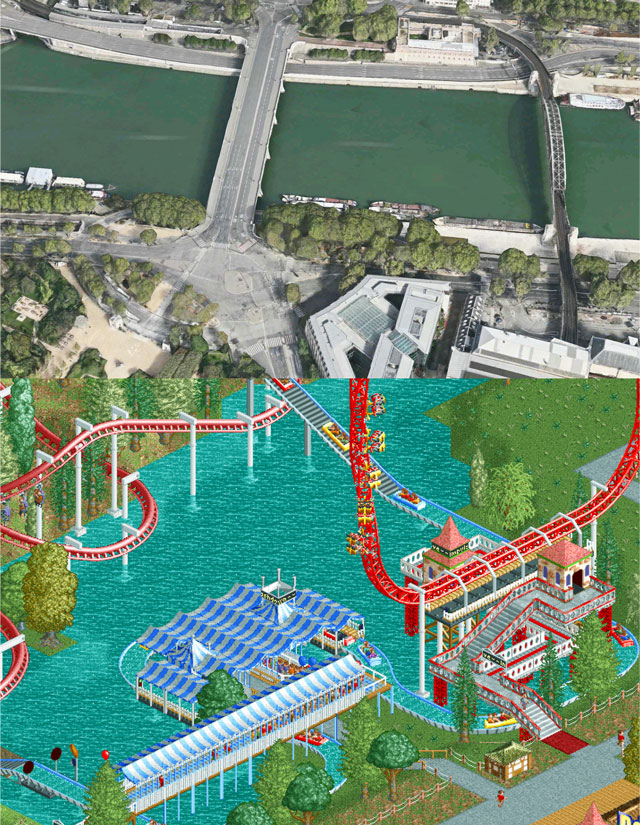
A speculative design project envisioning a car-free Paris shaped by play, movement, and collective well-being.

Developed through theoretical research fieldwork and material experimentation the project draws on Constant Nieuwenhuys’

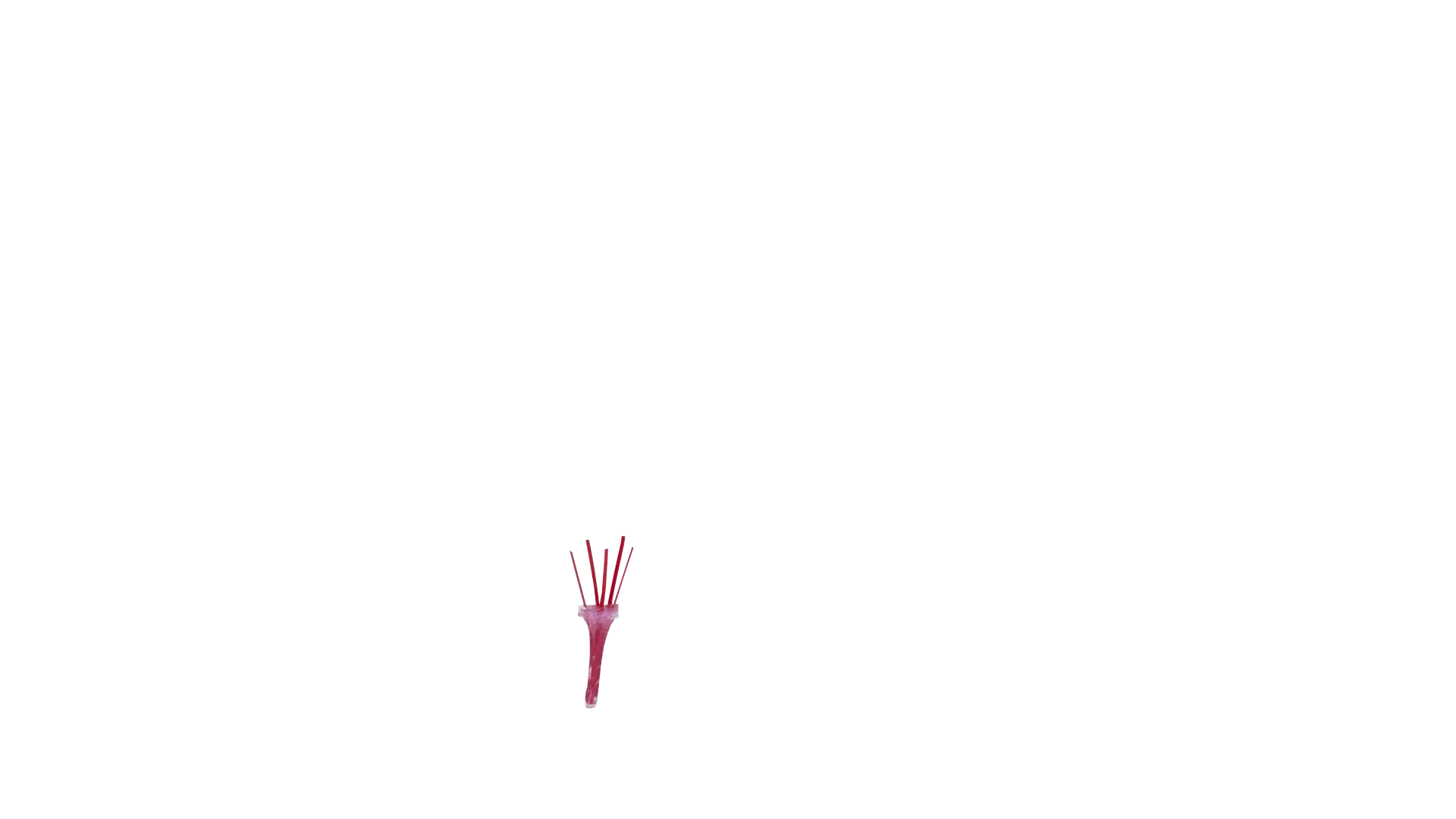
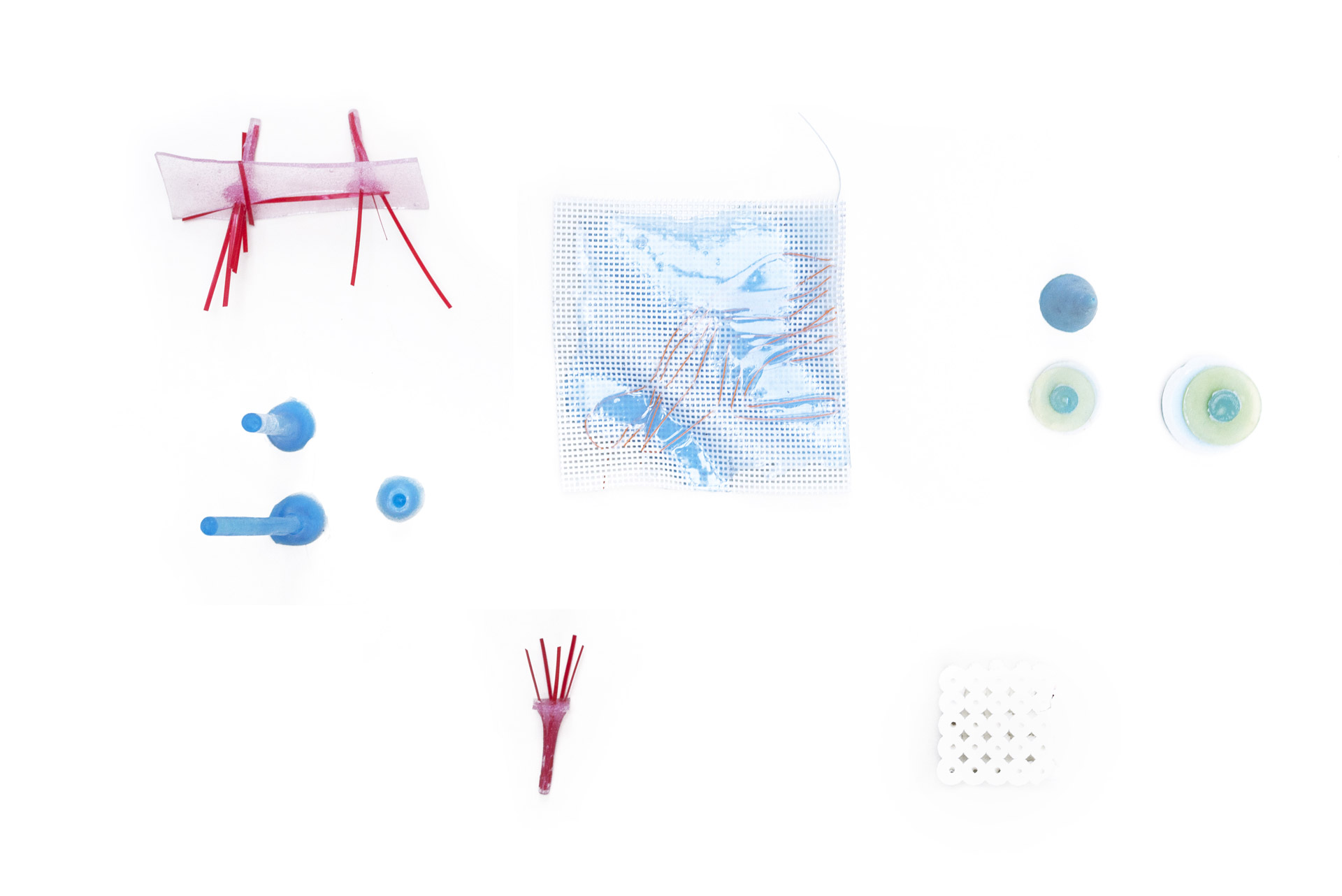
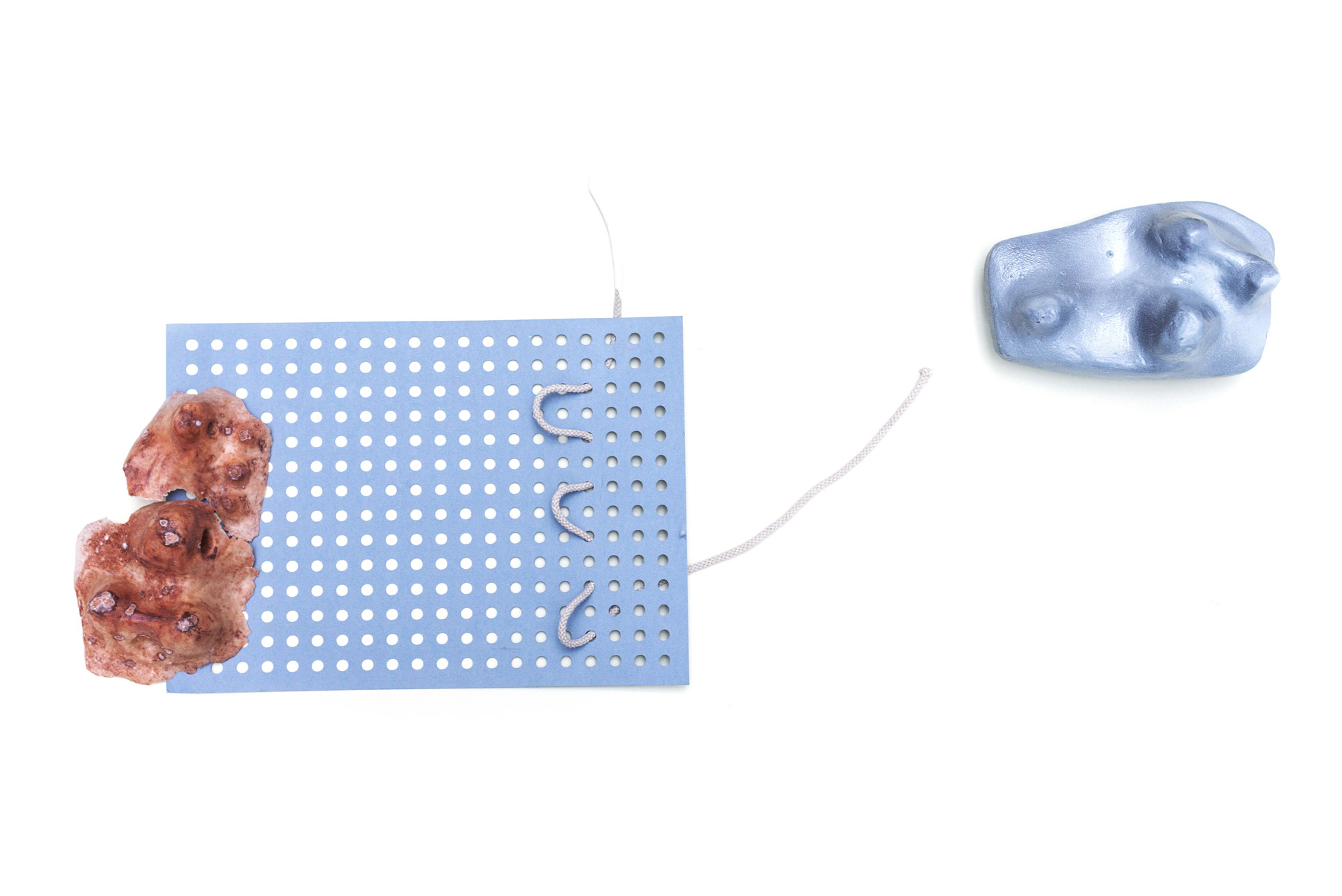
Materiality plays a central role in articulating this vision. The Soft Machines are developed through experiments with rope and silicone, materials chosen for their tactile and responsive qualities. Rope structures create an animal like surface that invites pulling tearing and grasping while silicone functions as a skin like membrane. Together these materials encourage direct physical interaction allowing the objects to be activated through touch movement and bodily engagement rather than instruction or control.

Credits The Soft Machines
Research/Design: Nora Dupont with Marvin Flores Unger
Photo Final Models: Véronique Huyghes
Sponsors and Partners